和第四节DQN的实例一样,我们依然使用CartPole-v1来作为训练环境。策略梯度的网络和DQN的网络结构是类似的,只是在输出层需要做Softmax处理,因为策略梯度的输出本质上是一个分类问题——将某一个状态分类到某一个动作的概率。而DQN网络则是一个回归问题——某一个网络在各个动作的Q值是多少。
1 2 3 4 5 6 7 8 9 10 11 class PolicyNet (nn.Module) : def __init__ (self, input_size, hidden, outputs) : super(PolicyNet, self).__init__() self.fc1 = nn.Linear(input_size, hidden) self.fc2 = nn.Linear(hidden, outputs) def forward (self, x) : x = F.relu(F.dropout(self.fc1(x), 0.1 )) x = self.fc2(x) return F.softmax(x, dim=1 )
不要忘了输出层的SoftMax。
初始化参数 相对于DQN,我们也不需要额外的目标网络和参数复制操作,只需要一个策略网络即可。
1 2 3 4 5 6 7 8 9 10 11 12 BATCH_SIZE = 256 GAMMA = 0.99 HIDDEN_SIZE = 15 LR = 0.005 n_actions = env.action_space.n input_size = env.observation_space.shape[0 ] policy_net = PolicyNet(input_size, HIDDEN_SIZE, n_actions) optimizer = optim.Adam(policy_net.parameters(), lr=LR) steps_done = 0
选择动作 在选择动作时,我们不再需要特地设置探索概率,因为输出结果就是各个动作的概率分布。我们使用torch.distributions.categorical.Categorical 来进行取样。在每次选择动作时,我们同时记录对应的概率,以便后续使用。这个概率就是 `ln pi_theta(S_t,A_t)`
1 2 3 4 5 6 7 8 9 10 11 12 log_probs = [] rewards = [] def select_action (state) : x = torch.unsqueeze(torch.FloatTensor(state),0 ) probs = policy_net(x) c = Categorical(probs) action = c.sample() prob = c.log_prob(action) log_probs.append(prob) return action
优化模型 为了更新参数,我们首先需要计算`v_t`,这在后续参数迭代中需要用到。
` v_t = r_(t+1) + gamma * v_(t+1) `
在模拟执行的时候,我们记录了每一步的reward,我们需要计算每一步的`v_t`,其顺序与执行顺序一致。根据公式我们需要倒序的计算`v_t`,然后将计算好的结果倒序排列,就形成了`v_1,v_2…v_t`的序列。最后我们需要将数据标准化。(TODO: 这里可能存在一个序列对应的问题,其中每一个状态的累计收益,是后续状态收益之和,不包含本轮收益)
1 2 3 4 5 6 7 8 9 values = [] v = 0 for reward in reversed(rewards): v = v * GAMMA + reward values.insert(0 , v) mean = np.mean(values) std = np.std(values) for i in range(size): values[i] = (values[i] - mean) / std
接下来我们需要更新参数,参数更新的公式为:
` theta larr theta + alpha v_t ln pi_theta (A_t|S_t) `
我们将其转换为损失函数形式:
` L(theta) = - v_t ln pi_theta(A_t|S_t) `
这个损失函数的形式可以帮助我们更好的理解策略梯度的原理。如果一个动作价值为负值,但是其选择概率为正,则损失较大。
1 2 3 4 5 6 7 8 9 10 loss = [] for i in np.random.choice(size, n): loss.append(- values[i] * log_probs[i]) loss = torch.cat(loss).sum() optimizer.zero_grad() loss.backward() for param in policy_net.parameters(): param.grad.data.clamp_(-1 , 1 ) optimizer.step()
训练循环 训练循环需要在一局结束之后进行。并清除rewards、log_probs缓存。对于cartpole-v1环境,要注意他的每一步奖励都是1,很显然在最后一步代表着游戏失败,我们需要施加一定的惩罚,我们将最后一步的奖励设为-100。
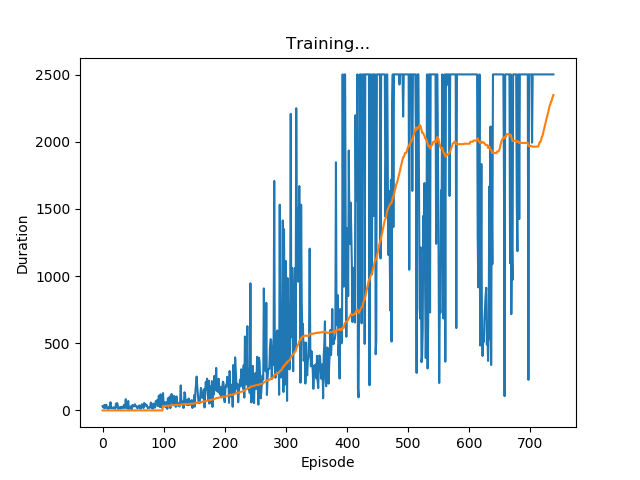
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 num_episodes = 5000 for i_episode in range(num_episodes): state = env.reset() for t in count(): action = select_action(state) if i_episode % 2000 == 0 : env.render() next_state, reward, done,_ = env.step(action.item()) if done: reward = -100 rewards.append(reward) state = next_state if done or t >= 2500 : optimize_model() print('EP' , i_episode) episode_durations.append(t+1 ) plot_durations() rewards = [] log_probs = [] break
完整代码