上一个例子中我们使用了冰面滑行的游戏环境,这是一个有限状态空间的环境。如果我们现在面对的是一个接近无限的状态空间呢?比如围棋,比如非离散型的问题。我们无法使用一个有限的Q表来存储所有Q值,即使有足够的存储空间,也没有足够的计算资源来遍历所有的状态空间。对于这一类问题,深度学习就有了施展的空间了。
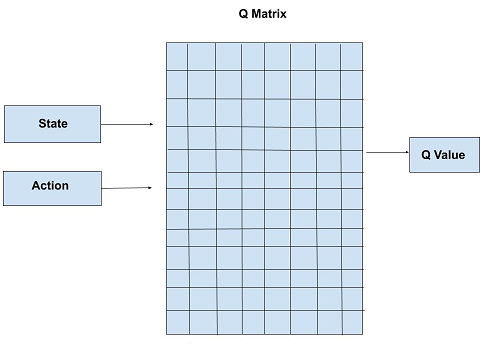
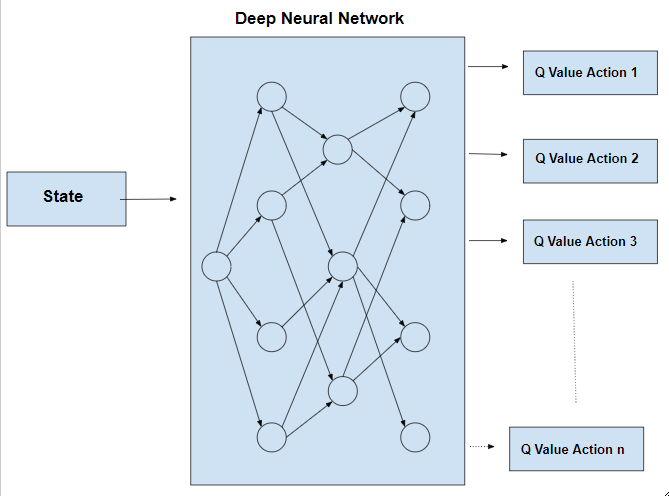
Q表存储着状态s和动作a、奖励r的信息。我们知道深度神经网络,也具有存储信息的能力。DQN算法就是将Q-table存储结构替换为神经网络来存储信息。我们定义神经网络`f(s, w) ~~ Q(s)`,输出为一个向量`[Q(s, a_1), Q(s, a_2), Q(s, a_3), …, Q(s, a_n)]`。经过这样的改造,我们就可以用Q-learing的算法思路来解决更复杂的状态空间的问题了。我们可以通过下面两张图来对比Q-learning和DQN的异同。
网络结构要根据具体问题来设计。在神经网络训练的过程中,损失函数是关键。我们采用MSE来计算error。
`L(w) = (ubrace(r + argmax_aQ(s’, a’))_(目标值) - ubrace(Q(s, a))_(预测值))^2`
基本算法描述
1 | 使用随机参数初始化网络Q |
但是,通过实验我们会发现,训练过程非常的不稳定。稳定性是强化学习所面临的主要问题之一,为了达到稳定的训练我们需要运用一些优化的手段。
环境的稳定性
Agent生活在环境之中,并根据环境的反馈进行学习,但环境是否是稳定的呢?假设agent在学习出门穿衣的技能,它需要学会在冬天多穿,夏天少穿。但是这个agent只会根据当天的反馈来修正自己的行为,也就是说这个agent是没有记忆的。那么这个agent就会在多次失败后终于在冬天学会了多穿衣,但转眼之间到了夏天他又会陷入不断的失败,最终他在夏天学会了少穿衣之后,又会在冬天陷入失败,如此循环不断,永远不会收敛。如果要能够很好的训练,这个agent至少要有一整年的记忆空间,每一批都要从过去的记忆中抽取记忆来进行训练,就可以避免遗忘过去的教训。
在DeepMind的Atari 论文中提到
First, we used a biologically inspired mechanism termed experience replay that randomizes over the data, thereby removing correlations in the observation sequence and smoothing over changes in the data distribution.
意思是,受生物学启发,他们采用了一种叫做经验回放(experience replay)的机制,随机抽取数据来到达“移除观察序列的相关性,平滑数据分布的改变”的目的。
我们已经理解了要有经验回放的记忆,但是为什么一定要随机抽取呢?对此论文认为这个随机抽取可以移除序列相关性、平滑分布中的改变。当如何理解呢?简单的说就是在我们不清楚合理的周期的情况下,能够保证采样的合理性。我们仍然以四季穿衣举例,假设我们不使用随机采样,我们必须在每次训练中都采用365天左右的数据,才能使我们的数据样本分布合理。可是agent并不清楚一年365天这个规律,这恰恰是我们所要学习的内容。采用随机采用,就可以自然的做到数据的分布合理,而且只需要使用记忆中的部分数据,减少单次迭代的计算量。
在这个记忆里,我们并不记录当时的网络参数(分析过程),我们只记录(状态s,动作a,新状态s’, 单步奖励r)。显然,记忆的尺寸不可能无限大。当记忆体增大到一定程度之后,我们采用滚动的方式用最新的记忆替换掉最老的记忆。就像在学习围棋的过程中,有初学者阶段的对局记忆,也有高手阶段的对局记忆,在提升棋艺的角度来看,高手阶段的记忆显然比初学者阶段的记忆更有价值。
说句题外话,其实对于一个民族而言也是一样的。我们这个民族拥有一个非常好的传统,就是记述历史,也就是等于我们这个民族拥有足够大的记忆量,这是我们胜于其他民族的。但是这个历史记录中,掺杂了历史上不同阶段的评价,这些评价是根据当时的经验得出的。而根据DQN的算法描述来看,对我们最有价值的部分其实是原始信息,而不是那些附加在之上的评价,这些评价有正确的部分,也有错误的部分,我们不用去过多关心。我们只需要在今天的认知(也就是最新的训练结果)基础上,对历史原始信息(旧状态、动作、新状态、单步奖励)进行随机的抽样分析即可。
网络稳定性
DQN另一个稳定性问题与目标值计算有关。因为`target = r + gamma * argmax Q(s’)`,所以目标值与网络参数本身是相关,而参数在训练中是不断变化的,所以这会造成训练中的不稳定。一个神经网络可以自动收敛,取决于存在一个稳定的目标,如果目标本身在不断的游移变动,那么想要达到稳定就比较困难。这就像站在平地上的人很容易平衡,但如果让人站在一个不断晃动的木板上,就很难达到平衡。为了解决这个问题,我们需要构建一个稳定的目标函数。
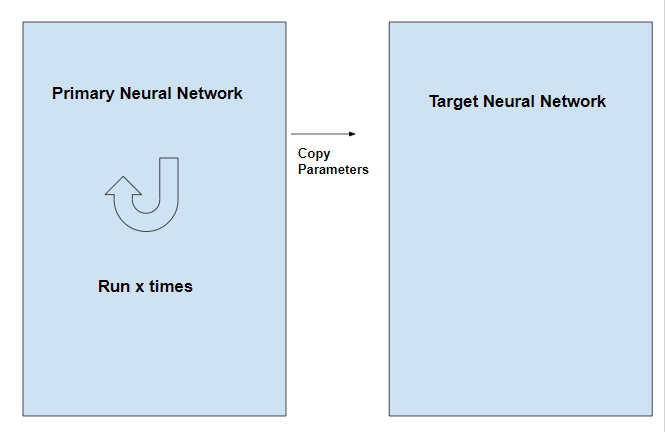
解决的方法是采用两个网络代替一个网络。一个网络用于训练调整参数,称之为策略网络,另一个专门用于计算目标,称之为目标网络。目标网络与策略网络拥有完全一样的网络结构,在训练的过程中目标网络的参数是固定的。执行一小批训练之后,将策略网络最新的参数复制到目标网络中。
经验回放和目标网络的效果见下表(引用自Nature 论文):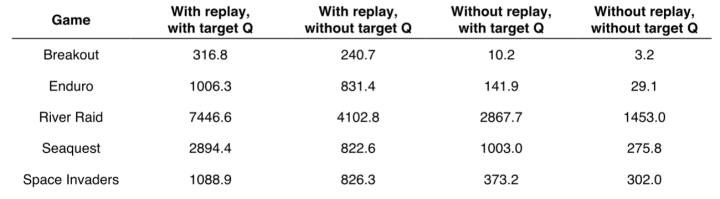
其他DQN优化
关于DQN的优化,这篇文章描述的比较全面 https://zhuanlan.zhihu.com/p/21547911。在之后的实践中考虑是否进一步深入。主要介绍3个改进:
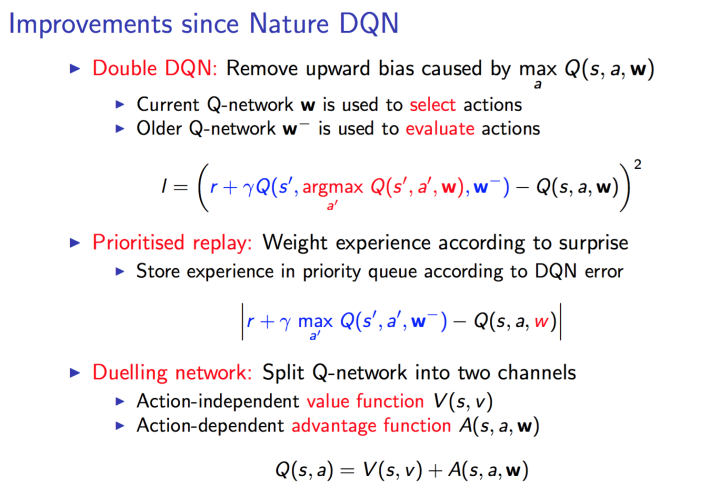
- Double DQN:对目标值计算的优化,a’使用策略网络选择的动作来代替目标网络选择的动作。
- Prioritised replay:使用优先队列(priority queue)来存储经验,避免丢弃早期的重要经验。使用error作为优先级,仿生学技巧,类似于生物对可怕往事的记忆。
- Dueling Network:将Q网络分成两个通道,一个输出V,一个输出A,最后再合起来得到Q。如下图所示(引用自Dueling Network论文)。这个方法主要是idea很简单但是很难想到,然后效果一级棒,因此也成为了ICML的best paper。
